"
"
Team:Grenoble-EMSE-LSU/Project/Device
From 2013.igem.org
(Difference between revisions)
| (37 intermediate revisions not shown) | |||
| Line 18: | Line 18: | ||
<li id="titre"> | <li id="titre"> | ||
<h1>Talk'E.coli - Our device</h1> | <h1>Talk'E.coli - Our device</h1> | ||
| + | |||
<p>Our project aims to <strong>control the concentration of living bacteria in a culture</strong>. To do so, we created a genetic network but to control the cell culture without employing <strong>any human means</strong> we needed to create <strong>a device</strong>. We have thus to create a means of communication from cell to machine and from machine to cell. To create the first one, we chose the red fluorescence protein KillerRed as a reporter protein. The first condition that our device needs to fulfill is to generate fluorescence thanks to a light source and a couple of excitation and emission filters and be able to measure its intensity. With these conditions our bacteria will be able to talk to our device. Then for the other way, the machine needs to send messages to the bacteria in order for them to know what to do – produce KillerRed or die. This is possible thanks to the inducible promoter and the property of KillerRed. Therefore our device must emit red light to induce the KillerRed production and white light to generate ROS with KillerRed. That means our device will be able to emit light to different wavelengths. But thanks to the modeling we know that the number of living cells can be controlled by the intensity of the white light, this is another condition our machine needs to satisfy. Firstly we will explain the choice of the different components, then the several experiences we did to find the most accurate parameters for each part of the device – <a href=#Photodiode>the photodiode</a>, <a href=#Arduino>Arduino</a>, <a href=#Fluo>florescence measurement</a>, <a href=#Electronic>the electronic circuit</a>, <a href=#Servo>the servomotor</a> and of course <a href=#Box>the box</a>.</p> | <p>Our project aims to <strong>control the concentration of living bacteria in a culture</strong>. To do so, we created a genetic network but to control the cell culture without employing <strong>any human means</strong> we needed to create <strong>a device</strong>. We have thus to create a means of communication from cell to machine and from machine to cell. To create the first one, we chose the red fluorescence protein KillerRed as a reporter protein. The first condition that our device needs to fulfill is to generate fluorescence thanks to a light source and a couple of excitation and emission filters and be able to measure its intensity. With these conditions our bacteria will be able to talk to our device. Then for the other way, the machine needs to send messages to the bacteria in order for them to know what to do – produce KillerRed or die. This is possible thanks to the inducible promoter and the property of KillerRed. Therefore our device must emit red light to induce the KillerRed production and white light to generate ROS with KillerRed. That means our device will be able to emit light to different wavelengths. But thanks to the modeling we know that the number of living cells can be controlled by the intensity of the white light, this is another condition our machine needs to satisfy. Firstly we will explain the choice of the different components, then the several experiences we did to find the most accurate parameters for each part of the device – <a href=#Photodiode>the photodiode</a>, <a href=#Arduino>Arduino</a>, <a href=#Fluo>florescence measurement</a>, <a href=#Electronic>the electronic circuit</a>, <a href=#Servo>the servomotor</a> and of course <a href=#Box>the box</a>.</p> | ||
</li> | </li> | ||
| Line 26: | Line 27: | ||
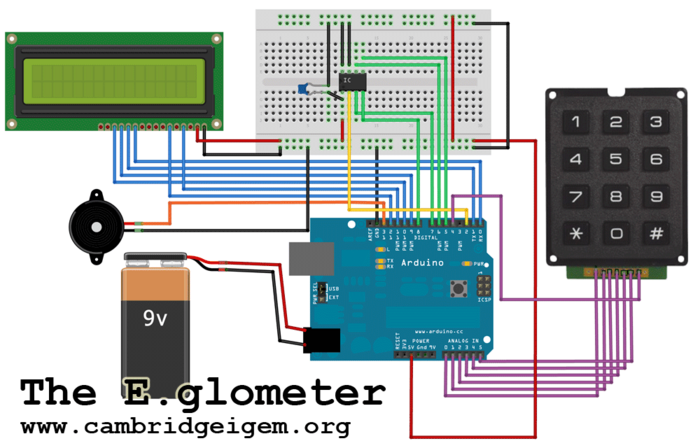
<p align="center"><img src="https://static.igem.org/mediawiki/2013/a/a7/Eglometer.png" alt="The Eglometer" width="500px" /></p> | <p align="center"><img src="https://static.igem.org/mediawiki/2013/a/a7/Eglometer.png" alt="The Eglometer" width="500px" /></p> | ||
| - | <p id="legend"><strong><em>The E. glometer of Cambrige team (iGEM 2010)</em></strong><br> | + | <p id="legend"><strong><em>The E. glometer of Cambrige team (iGEM 2010)</em></strong></br> |
| - | Device built by Cambrige team in 2010 to measure the light intensity of their LuxBrick<br> | + | Device built by Cambrige team in 2010 to measure the light intensity of their LuxBrick</br> |
<em><strong>Source:</strong></em><a href="https://2010.igem.org/Team:Cambridge/Tools/Eglometer">https://2010.igem.org/Team:Cambridge/Tools/Eglometer</a> | <em><strong>Source:</strong></em><a href="https://2010.igem.org/Team:Cambridge/Tools/Eglometer">https://2010.igem.org/Team:Cambridge/Tools/Eglometer</a> | ||
</p> | </p> | ||
| - | |||
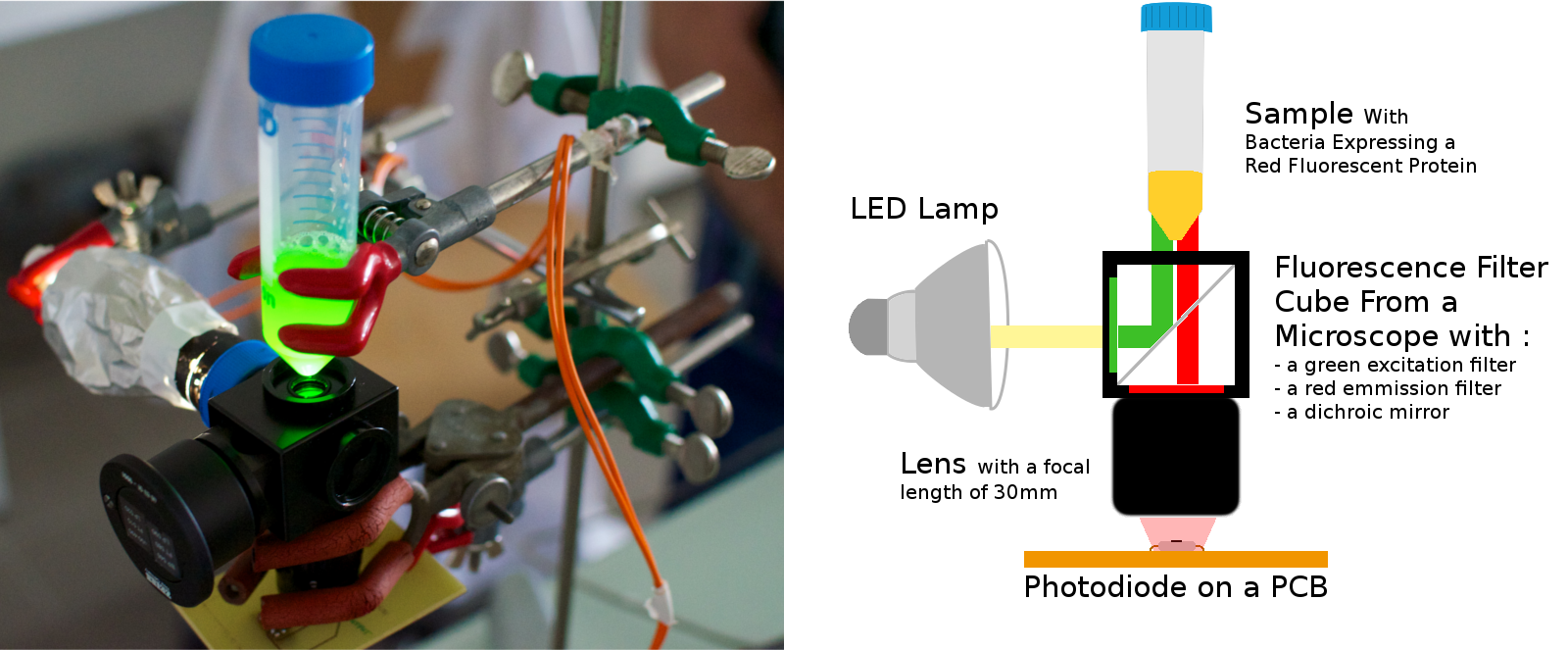
<p> | <p> | ||
We use a similar photodiode (TSL230RD) – the same as the TSL230RP-LF but as a surface mounted device (SMD) – and an Arduino Uno. Arduino is a single-board microcontroller created to make electronics more accessible. The main asset of the photodiode is that the output can be either a pulse train or a square wave (50% duty cycle) with its frequency directly proportional to light intensity. Since we are using a microcontroller, it is easy to calculate the frequency with the digital input of the microchip thanks to high or low level detection and we will have a better resolution because low frequencies are easier to measure than low voltages at low light levels. For the optical part we use a LED lamp and a cube filter from a fluorescence microscope with excitation and emission filters and an adjustable lens. The LED lamp was chosen so that e didn't have to buy high-power LEDS and build a card with heat sinks. This lamp illuminates with 520 lumens in a 40° cone under 12V and 6W. The low voltage was chosen as a safety measure and the small angle to avoid losing too much light. The excitation filter is a green interferential filter to excite the red fluorescent protein and the red emission filter is only a colored filter to collect all the red light in order to have a more precise measure. In the cube there is also a dichroic mirror that reflects all the green light and transmits all the red light. This mirror enables us to separate the photodiode from the light source completely. | We use a similar photodiode (TSL230RD) – the same as the TSL230RP-LF but as a surface mounted device (SMD) – and an Arduino Uno. Arduino is a single-board microcontroller created to make electronics more accessible. The main asset of the photodiode is that the output can be either a pulse train or a square wave (50% duty cycle) with its frequency directly proportional to light intensity. Since we are using a microcontroller, it is easy to calculate the frequency with the digital input of the microchip thanks to high or low level detection and we will have a better resolution because low frequencies are easier to measure than low voltages at low light levels. For the optical part we use a LED lamp and a cube filter from a fluorescence microscope with excitation and emission filters and an adjustable lens. The LED lamp was chosen so that e didn't have to buy high-power LEDS and build a card with heat sinks. This lamp illuminates with 520 lumens in a 40° cone under 12V and 6W. The low voltage was chosen as a safety measure and the small angle to avoid losing too much light. The excitation filter is a green interferential filter to excite the red fluorescent protein and the red emission filter is only a colored filter to collect all the red light in order to have a more precise measure. In the cube there is also a dichroic mirror that reflects all the green light and transmits all the red light. This mirror enables us to separate the photodiode from the light source completely. | ||
| Line 53: | Line 53: | ||
<h2 id="Arduino">Arduino</h2> | <h2 id="Arduino">Arduino</h2> | ||
<p>Arduino is used to translate the frequency given by the photodiode in irrandiance that gives us the light intensity. The algorithm is quite simple. It counts the number of high levels (samples) and the duration of the measurement (length) and with these two elements it makes this calculation:</br></br> | <p>Arduino is used to translate the frequency given by the photodiode in irrandiance that gives us the light intensity. The algorithm is quite simple. It counts the number of high levels (samples) and the duration of the measurement (length) and with these two elements it makes this calculation:</br></br> | ||
| - | Irradiance=frequency/(frequency scaling)= samples/(frequency scaling × length)</br></br> | + | <strong>Irradiance=frequency/(frequency scaling)= samples/(frequency scaling × length)</strong></br></br></p> |
| + | <p align="center"><img src="https://static.igem.org/mediawiki/2013/2/22/Algo_photodiode.PNG" alt="algo_photodiode" width="500px" /></p> | ||
| + | <p> | ||
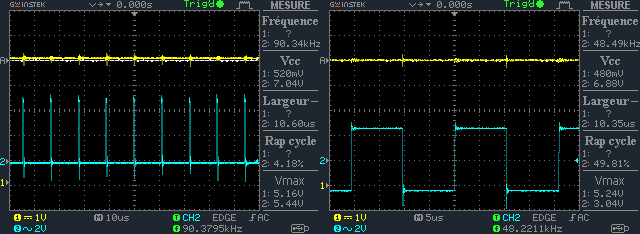
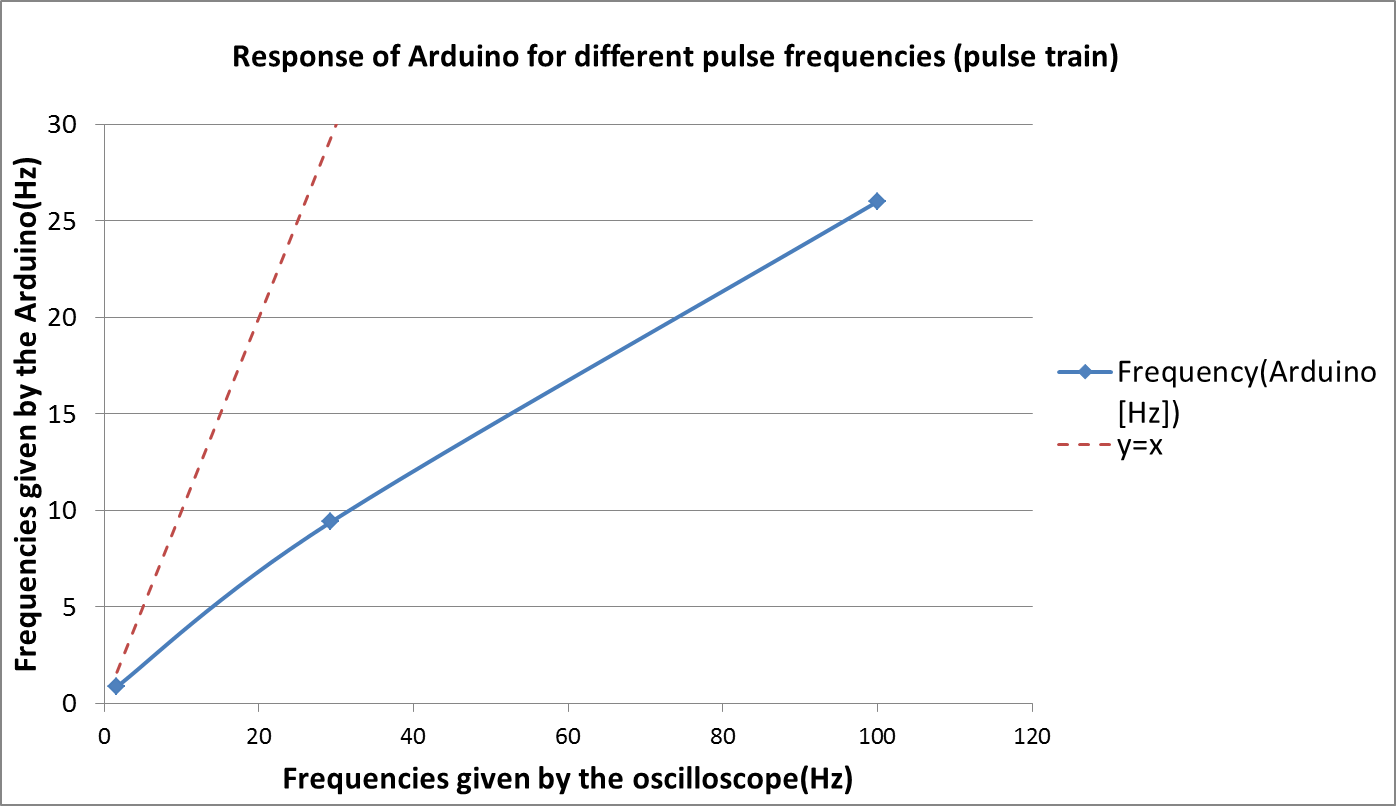
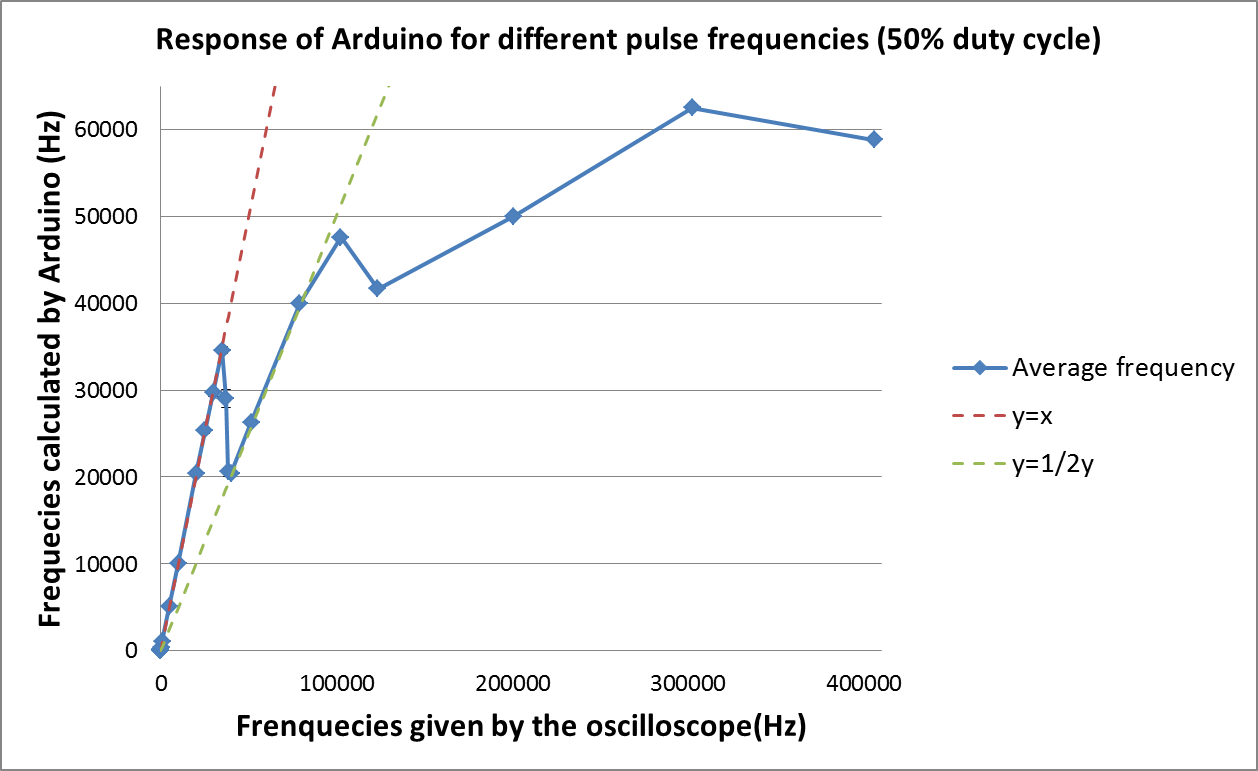
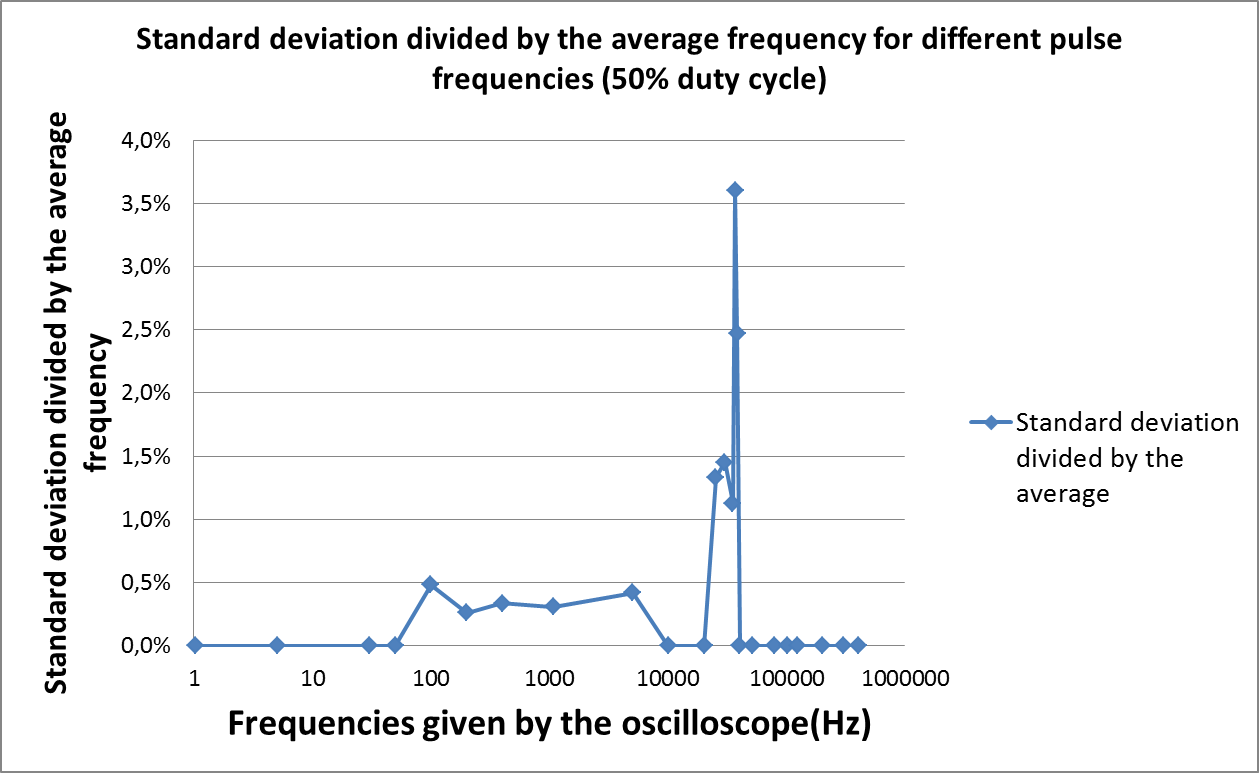
To know if this program works, a function generator was plug in one of the digital input of Arduino instead of the photodiode. By changing the frequency of the square signal sent by the generator and measuring several times the frequency with Arduino and compare the measures to the frequency given by an oscilloscope, we can calculate the accuracy of the program.</br> | To know if this program works, a function generator was plug in one of the digital input of Arduino instead of the photodiode. By changing the frequency of the square signal sent by the generator and measuring several times the frequency with Arduino and compare the measures to the frequency given by an oscilloscope, we can calculate the accuracy of the program.</br> | ||
| - | If the algorithm is right, the curve should follow the equation x=y, which means that Arduino and the oscilloscope measure the same frequencies.</br></p> | + | If the algorithm is right, the curve should follow the equation x=y, which means that Arduino and the oscilloscope measure the same frequencies.</br></br></p> |
| - | <p align="center", style="margin:30px"><img src="https://static.igem.org/mediawiki/2013/3/31/Arduino_mode1.png" alt="Arduino Mode1" width=" | + | <p align="center", style="margin:30px"><img src="https://static.igem.org/mediawiki/2013/3/31/Arduino_mode1.png" alt="Arduino Mode1" width="550px"> |
| - | <img src="https://static.igem.org/mediawiki/2013/8/86/Arduino_mode2.png" alt="Arduino Mode2" width=" | + | <img src="https://static.igem.org/mediawiki/2013/8/86/Arduino_mode2.png" alt="Arduino Mode2" width="550px"> |
| - | <img src="https://static.igem.org/mediawiki/2013/4/40/Arduino_std.png" alt="Arduino Mode2 standard deviation" width=" | + | <img src="https://static.igem.org/mediawiki/2013/4/40/Arduino_std.png" alt="Arduino Mode2 standard deviation" width="550px"> |
</br></p> | </br></p> | ||
| Line 81: | Line 83: | ||
</p> | </p> | ||
</li> | </li> | ||
| - | + | ||
| - | + | ||
<li> | <li> | ||
<h2 id="Electronic">Electronic circuit</h2> | <h2 id="Electronic">Electronic circuit</h2> | ||
| Line 89: | Line 90: | ||
<li> | <li> | ||
<h2 id="Servo">Servomotor</h2> | <h2 id="Servo">Servomotor</h2> | ||
| - | <p></p> | + | <p>Since we are only using 3 different wavelengths, green for the fluorescence, red for inducing KillerRed and white light to kill the cell, we just need 3 slots. To be easier to calculate, we assign the first slot to the first position and the third slot to the last position.</p> |
| + | <p align="center"> | ||
| + | <img src="https://static.igem.org/mediawiki/2013/d/da/Servo_pos1.png" alt="Position1_servo" width="450px" /> | ||
| + | <img src="https://static.igem.org/mediawiki/2013/a/a8/Servo_pos2.png" alt="Position2_servo" width="450px" /></p> | ||
| + | <p id="legend"><strong><em>On the left, the first position of the servomotor and on the right, the second position of the servomotor </em></strong></br> | ||
| + | The data:</br> | ||
| + | <strong>L</strong>: distance between the center of the servomotor S and the center of the hole in the box A (6.5cm)</br> | ||
| + | <strong>h</strong>: height from A to S (2cm)</br> | ||
| + | <strong>R</strong>: radius of the filter and also the hole in the box (1cm)</br> | ||
| + | <strong>X</strong>: distance between one part of the arm and the filter rack (0.2cm)</br> | ||
| + | <strong>b</strong>: distance between the beginning of the filter rack and the filter (0.2cm) – 2b is the distance between each filters</br> | ||
| + | What we want to know:</br> | ||
| + | <strong>a</strong>: radius of the servomotor</br> | ||
| + | <strong>l</strong>: length of the arm that moves the filter rack</br></br> | ||
| + | </p> | ||
| + | <p></br>It is known that: </br></br></p> | ||
| + | <p align="center"><img src="https://static.igem.org/mediawiki/2013/c/cd/Equations1-2.PNG" alt="position_eq_servo" /></p> | ||
| + | <p></br>That means: </br></br></p> | ||
| + | <p align="center"><img src="https://static.igem.org/mediawiki/2013/1/11/Equations_a.PNG" alt="a_radius_servo" /></p> | ||
| + | <p></br>To have enough power to push and pull the filter rack the angle <strong>α</strong> need to be bigger than 45°, that means:</br></br></p> | ||
| + | <p align="center"><img src="https://static.igem.org/mediawiki/2013/7/7f/Equations_condition.PNG" alt="condition_servo" /></p> | ||
| + | <p></br>But knowing <strong>a</strong> we can calculate <strong>l</strong> with [1]:</br></br></p> | ||
| + | <p align="center"><img src="https://static.igem.org/mediawiki/2013/7/74/Equations_l.PNG" alt="l_length_arm_servo" /></p> | ||
</li> | </li> | ||
<li> | <li> | ||
<h2 id="Box">The Box</h2> | <h2 id="Box">The Box</h2> | ||
| - | < | + | <object width="480" height="360"><param name="movie" value="//www.youtube.com/v/qruRM62kY-k?hl=fr_FR&version=3"></param><param name="allowFullScreen" value="true"></param><param name="allowscriptaccess" value="always"></param><embed src="//www.youtube.com/v/qruRM62kY-k?hl=fr_FR&version=3" type="application/x-shockwave-flash" width="480" height="360" allowscriptaccess="always" allowfullscreen="true"></embed></object> |
</li> | </li> | ||
| + | <li id="next"><a href="/Team:Grenoble-EMSE-LSU/Project/Modelling/Predict">Next Page</a></li> | ||
| + | |||
</ul> | </ul> | ||
</div> | </div> | ||
</html> | </html> | ||
Latest revision as of 08:31, 24 September 2013