 "
"
Team:HUST-China/Modelling
From 2013.igem.org
HUST Oshyn (Talk | contribs) |
HUST LiChen (Talk | contribs) |
||
| (32 intermediate revisions not shown) | |||
| Line 6: | Line 6: | ||
<body> | <body> | ||
<div id="showcase" class="header"> | <div id="showcase" class="header"> | ||
| - | + | <div id="showcase-cont" class="pr mc h oflowh" style="overflow: visible;"> | |
| - | + | <div class="showcase-ones" style="display: none; position: relative; left: 0px; top: 0px;" style="left: 0px;"> | |
| + | <img class="showcase-left" src="https://static.igem.org/mediawiki/2013/b/b8/HUST-nav3-2.png" title="" /> | ||
| + | <img class="showcase-right" src="https://static.igem.org/mediawiki/2013/5/56/HUST-nav3-1.png" title="" /> | ||
| + | </div> | ||
| + | |||
| + | <div class="showcase-ones" style="display: none; position: relative; left: 0px; top: 0px;" style="left: 0px;"> | ||
<img class="showcase-left" src="https://static.igem.org/mediawiki/2013/4/43/HUST-ig.png" style="left: 0px;"/> | <img class="showcase-left" src="https://static.igem.org/mediawiki/2013/4/43/HUST-ig.png" style="left: 0px;"/> | ||
<img class="showcase-right" src="https://static.igem.org/mediawiki/2013/9/96/HUST-em.png" title="" /> | <img class="showcase-right" src="https://static.igem.org/mediawiki/2013/9/96/HUST-em.png" title="" /> | ||
| Line 16: | Line 21: | ||
</div> | </div> | ||
<div class="showcase-ones" style="display: none; position: relative; left: 0px; top: 0px;" style="left: 0px;"> | <div class="showcase-ones" style="display: none; position: relative; left: 0px; top: 0px;" style="left: 0px;"> | ||
| - | <img class="showcase-left" src="https://static.igem.org/mediawiki/2013/ | + | <img class="showcase-left" src="https://static.igem.org/mediawiki/2013/a/a2/HUST-nav2-2.png" title="" /> |
| - | <img class="showcase-right" src="https://static.igem.org/mediawiki/2013/ | + | <img class="showcase-right" src="https://static.igem.org/mediawiki/2013/8/88/HUST-nav2-1.png" title="" /> |
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
</div> | </div> | ||
| + | |||
<div class="showcase-inner none" id="showcase-inner" style="display: block;"> | <div class="showcase-inner none" id="showcase-inner" style="display: block;"> | ||
<!--[if lte IE 8]> | <!--[if lte IE 8]> | ||
| Line 36: | Line 38: | ||
<div class="navbar navbar-inverse" id="mainNavBar" style="margin:0;"> | <div class="navbar navbar-inverse" id="mainNavBar" style="margin:0;"> | ||
<div class="navbar-inner" | <div class="navbar-inner" | ||
| - | style="border-bottom:4px dashed #f2f2f2;"> | + | style="border-bottom:4px dashed #f2f2f2;"><div style="float:left;"><a href="https://2013.igem.org" title="2013 IGEM Main page"><img src="https://static.igem.org/mediawiki/2013/4/4e/UNIK_Copenhagen_iGEM_logo.png" style="width:50px;"></a></div> |
| - | <div class="nav-collapse collapse span9 | + | <div class="nav-collapse collapse span9"> |
<ul class="nav"> | <ul class="nav"> | ||
<li> | <li> | ||
| Line 59: | Line 61: | ||
</ul> | </ul> | ||
</div> | </div> | ||
| - | + | ||
</div> | </div> | ||
</div> | </div> | ||
| Line 68: | Line 70: | ||
<ul class="nav nav-list bs-docs-sidenav"> | <ul class="nav nav-list bs-docs-sidenav"> | ||
<!------------------------------------------Left side navigator start----------------------------------------------------> | <!------------------------------------------Left side navigator start----------------------------------------------------> | ||
| - | + | <li class="active"><a href="javascript:void;">Overview</a></li> | |
| - | + | <li><a href="https://2013.igem.org/Team:HUST-China/Modelling/DDE_Model"></i>Delay Differential Equations</a></li> | |
| - | + | <li><a href="https://2013.igem.org/Team:HUST-China/Modelling/MCOS"></i>Multi Cells Oscillation Simulation</a></li> | |
| + | <li><a href="https://2013.igem.org/Team:HUST-China/Modelling/Wet-lab_data_analysis">Wet-lab Data Analysis</a></li> | ||
<!------------------------------------------Left side navigator end----------------------------------------------------> | <!------------------------------------------Left side navigator end----------------------------------------------------> | ||
</ul> | </ul> | ||
| Line 78: | Line 81: | ||
<!----------------------------------------------Main content start------------------------------------------------------> | <!----------------------------------------------Main content start------------------------------------------------------> | ||
<div id="Part-1"> | <div id="Part-1"> | ||
| - | < | + | <h3 class="page-header"><strong>Overview</strong></h3> |
</div> | </div> | ||
<p> | <p> | ||
| - | + | The genetic pathway we used in modelling work is described as below. | |
| - | < | + | <div style="float:right;"> |
| - | + | <img src="https://static.igem.org/mediawiki/2013/a/ab/Pathway_HUST.png" width="350px;" /> | |
| - | < | + | <p class="small">Fig 1.The pathway of genetic oscillator used in our project.</p |
| - | < | + | ></div> |
| - | <p> | + | <h4>Approach and Result</h4> |
| - | + | Our modeling work includes 3 parts: | |
| + | <strong> | ||
| + | (1)Feasibility, stability and sensitivity of single genetic oscillator and its parameters;<br> | ||
| + | (2)Feasibility of multi cells’ oscillator made up by a group of single genetic oscillators and comparison with experiment data;<br> | ||
| + | (3)Statistically analyzing our wet-lab result. | ||
| + | </strong><br> | ||
| + | |||
| + | <p> To finish part (1), we construct DDEs model, which superb model using <acronym title="Ordinary Differential Equation">ODEs</acronym> because it is capable of describing time interval between expression of regulating protein and their binding to promoters; in other words, our model is much more precise than ODEs model. Moreover, DDEs model is more flexible than ODEs model, as we can degrade it into an ODEs one by setting lag equal to 0. Result of our model is satisfying, as our oscillator is stable while circumstance(Arabinose and IPTG) varies, and sensitive when itself($\tau$) changes. That is to say, it is easy for manipulate, which is good for further application.</p> | ||
| + | <p> To accomplish part (2), we use data from part (1) and simulate using Agent-Based Model. We then compare simulation outcome with our wet-lab data. There comes a promising result, as florescent intensity linearly related to expression of AraC of these two groups of data match each other well, namely our model is supported by our experiment. This model is extendable because it has capability simulating other problem in large population. Also method that used to compar wetlab and drylab data, which is Q-Q plot, provides a quick way for analyzing groups of data correspondent time interval remained unknown.</p> | ||
| + | <p> To fulfill part (3), we use Q-Q plot and <acronym title="Kolmogorov-Smirnov">K-S</acronym> test to confirm that single transformed cells and co-transformed cells are different. We then use <acronym title="Shapiro-Wilk">S-W</acronym> test to demonstrate that the oscillatory behavior of our oscillator is not a Brownian motion, which is often neglected regardless of its importance.</p> | ||
| + | <h4>Notes</h4> | ||
| + | Throughout the whole modelling work, we choose to study AraC instead of mRFP since they are in the same plasmid and we assumed that the expression rate of both protein is similar. By doing this, we can reduce the number of equations. | ||
</p> | </p> | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
<!----------------------------------------------Main content end------------------------------------------------------> | <!----------------------------------------------Main content end------------------------------------------------------> | ||
</div> | </div> | ||
| Line 104: | Line 111: | ||
<div class="modal-footer footer"> | <div class="modal-footer footer"> | ||
| - | < | + | <br/> |
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
<div> | <div> | ||
CopyRight ©<a href="https://2013.igem.org">2013.igem.org</a> All Rights Reserved! | CopyRight ©<a href="https://2013.igem.org">2013.igem.org</a> All Rights Reserved! | ||
| Line 129: | Line 125: | ||
var scroll = $(document).scrollTop(); | var scroll = $(document).scrollTop(); | ||
var navli = $("#navbar .nav li"); | var navli = $("#navbar .nav li"); | ||
| - | + | /* var part1= $("#Part-1").outerHeight(); | |
var part2= $("#Part-2").outerHeight(); | var part2= $("#Part-2").outerHeight(); | ||
var part3= $("#Part-3").outerHeight(); | var part3= $("#Part-3").outerHeight(); | ||
var futurework= $("#Future-Work").outerHeight(); | var futurework= $("#Future-Work").outerHeight(); | ||
| - | var judge= $("#Judging-Criteria").outerHeight(); | + | var judge= $("#Judging-Criteria").outerHeight();*/ |
| - | if(scroll > | + | if(scroll > 204){ |
$("#up").slideDown("ease-out"); | $("#up").slideDown("ease-out"); | ||
$("#mainNavBar").addClass("navbar-fixed-top"); | $("#mainNavBar").addClass("navbar-fixed-top"); | ||
$(".bs-docs-sidenav").removeClass("affix-top").addClass("affix"); | $(".bs-docs-sidenav").removeClass("affix-top").addClass("affix"); | ||
| - | + | /* if (scroll < 454 + part1){ | |
navli.removeClass("active").eq(0).addClass("active"); | navli.removeClass("active").eq(0).addClass("active"); | ||
}else if (!(scroll < 454 + part1|| scroll > 454 + part1+ part2)){ | }else if (!(scroll < 454 + part1|| scroll > 454 + part1+ part2)){ | ||
| Line 148: | Line 144: | ||
}else if (!(scroll < 454 + part1 + part2 + part3 + futurework || scroll > 454 + part1+ part2 + part3 + judge)){ | }else if (!(scroll < 454 + part1 + part2 + part3 + futurework || scroll > 454 + part1+ part2 + part3 + judge)){ | ||
navli.removeClass("active").eq(4).addClass("active"); | navli.removeClass("active").eq(4).addClass("active"); | ||
| - | } | + | }*/ |
}else{ | }else{ | ||
$("#up").slideUp("ease-in"); | $("#up").slideUp("ease-in"); | ||
$("#mainNavBar").removeClass("navbar-fixed-top"); | $("#mainNavBar").removeClass("navbar-fixed-top"); | ||
$(".bs-docs-sidenav").removeClass("affix").addClass("affix-top"); | $(".bs-docs-sidenav").removeClass("affix").addClass("affix-top"); | ||
| - | navli.removeClass("active").eq(0).addClass("active"); | + | //navli.removeClass("active").eq(0).addClass("active"); |
} | } | ||
}); | }); | ||
Latest revision as of 02:50, 29 October 2013








Overview
The genetic pathway we used in modelling work is described as below.
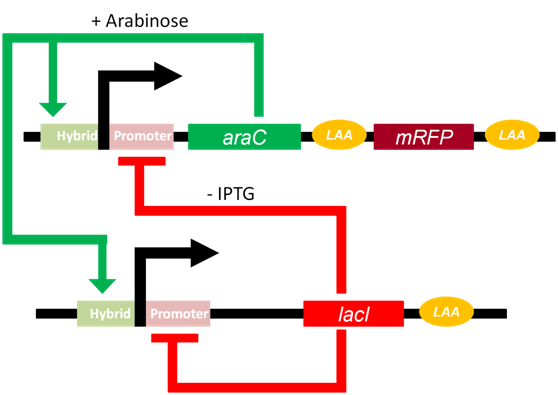
Fig 1.The pathway of genetic oscillator used in our project.
Approach and Result
Our modeling work includes 3 parts: (1)Feasibility, stability and sensitivity of single genetic oscillator and its parameters;(2)Feasibility of multi cells’ oscillator made up by a group of single genetic oscillators and comparison with experiment data;
(3)Statistically analyzing our wet-lab result.
To finish part (1), we construct DDEs model, which superb model using ODEs because it is capable of describing time interval between expression of regulating protein and their binding to promoters; in other words, our model is much more precise than ODEs model. Moreover, DDEs model is more flexible than ODEs model, as we can degrade it into an ODEs one by setting lag equal to 0. Result of our model is satisfying, as our oscillator is stable while circumstance(Arabinose and IPTG) varies, and sensitive when itself($\tau$) changes. That is to say, it is easy for manipulate, which is good for further application.
To accomplish part (2), we use data from part (1) and simulate using Agent-Based Model. We then compare simulation outcome with our wet-lab data. There comes a promising result, as florescent intensity linearly related to expression of AraC of these two groups of data match each other well, namely our model is supported by our experiment. This model is extendable because it has capability simulating other problem in large population. Also method that used to compar wetlab and drylab data, which is Q-Q plot, provides a quick way for analyzing groups of data correspondent time interval remained unknown.
To fulfill part (3), we use Q-Q plot and K-S test to confirm that single transformed cells and co-transformed cells are different. We then use S-W test to demonstrate that the oscillatory behavior of our oscillator is not a Brownian motion, which is often neglected regardless of its importance.