"
"
Team:Grenoble-EMSE-LSU/Project/Modelling/Density
From 2013.igem.org
(Difference between revisions)
| (3 intermediate revisions not shown) | |||
| Line 29: | Line 29: | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| Line 64: | Line 54: | ||
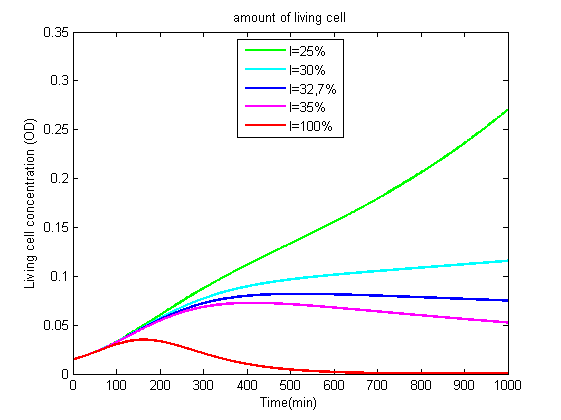
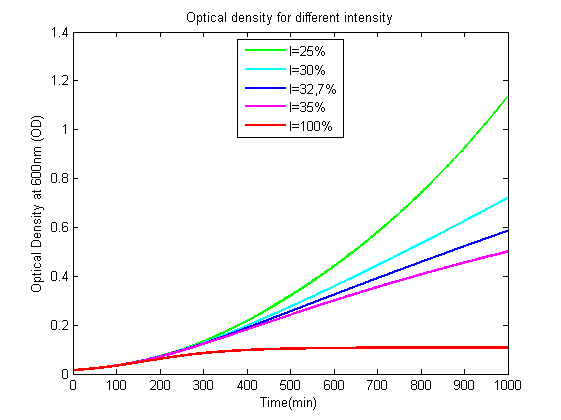
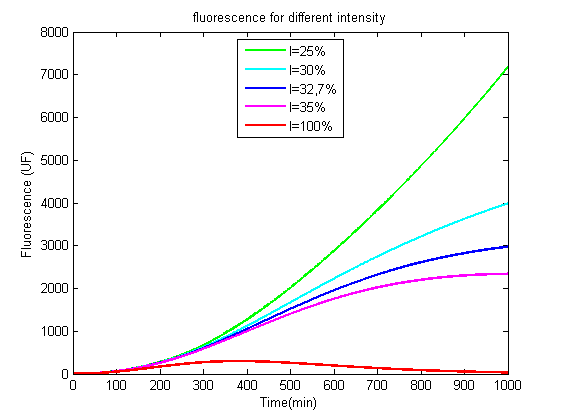
<p>These simulations were conducted with the following values of the parameters: </p> | <p>These simulations were conducted with the following values of the parameters: </p> | ||
<p> $r=8,3.10^{-3} min^{-1}$, or $R=83 min$ (time of division)</p> | <p> $r=8,3.10^{-3} min^{-1}$, or $R=83 min$ (time of division)</p> | ||
| - | <p> $a=130 | + | <p> $a=130 RFU.OD^{-1}.min^{-1}$</p> |
| - | <p> $b=0,9.10^{-2} | + | <p> $b=0,9.10^{-2}RFU.UL^{-1}.min^{-1}$</p> |
| - | <p> $k=0,9.10^{-7}OD. | + | <p> $k=0,9.10^{-7}OD.RFU^{-1}.UL^{-1}.min^{-1}$</p> |
<p> $l=0.087$</p> | <p> $l=0.087$</p> | ||
<p> $m=6,3.10^{-3} min^{-1}$, or $M=110 min$ (half-time of maturation)</p> | <p> $m=6,3.10^{-3} min^{-1}$, or $M=110 min$ (half-time of maturation)</p> | ||
| Line 72: | Line 62: | ||
<p> And the initial contitions were:</p> | <p> And the initial contitions were:</p> | ||
<p> $OD_{600}=0.015$</p> | <p> $OD_{600}=0.015$</p> | ||
| - | <p> $fluorescence= | + | <p> $fluorescence=0RFU$</p> |
<br> | <br> | ||
| Line 100: | Line 90: | ||
<li > | <li > | ||
<h2 id="MPC">Model Predictive Control</h2> | <h2 id="MPC">Model Predictive Control</h2> | ||
| - | <p>Since our system cannot be stabilized with a simple closed-loop control, we used a more advanced control method : <a href="http://en.wikipedia.org/wiki/Model_predictive_control">Model Predictive Control</a>. This algorithm is used to control dynamical systems. It requires a mathematical model of the behavior of the system, and the history of the past control actions. The aim is to drive our system to a setpoint by predicting the evolution of the system, and adapting the control parameter (the light intensity here) to these predictions. To do so, the control will use different kinds of variables:</p> | + | <p>Since our system cannot be stabilized with a simple closed-loop control, we used a more advanced control method: <a href="http://en.wikipedia.org/wiki/Model_predictive_control">Model Predictive Control</a>. This algorithm is used to control dynamical systems. It requires a mathematical model of the behavior of the system, and the history of the past control actions. The aim is to drive our system to a setpoint by predicting the evolution of the system, and adapting the control parameter (the light intensity here) to these predictions. To do so, the control will use different kinds of variables:</p> |
<p>$\bullet$ Some variables defines the setpoint, here, we want to drive our living bacteria concentration to a determinate value, called $C_{target}$.</p> | <p>$\bullet$ Some variables defines the setpoint, here, we want to drive our living bacteria concentration to a determinate value, called $C_{target}$.</p> | ||
<p>$\bullet$ Some variables are measurable during the experiment. Here, the fluorescence and the optical density. They are the only observable quantities enabling us to see whether the system behaves according to plans or not.</p> | <p>$\bullet$ Some variables are measurable during the experiment. Here, the fluorescence and the optical density. They are the only observable quantities enabling us to see whether the system behaves according to plans or not.</p> | ||
| - | <p>$\bullet$ Other variables cannot be measured and have to be estimated | + | <p>$\bullet$ Other variables cannot be measured and have to be estimated from the model. In our case, the concentration of living bacteria cannot be measured in real time, so it will be estimated from the measurable quantities. The model thus needs to be precise. |
| - | <p>$\bullet$ And some variables are the ones used to act on the system. In our case, this is the light intensity will affect the system by decreasing the amount of living bacteria and the concentration of KillerRed.</p> | + | <p>$\bullet$ And some variables are the ones used to act on the system. In our case, this is the light intensity which will affect the system by decreasing the amount of living bacteria and the concentration of KillerRed.</p> |
<br> | <br> | ||
| Line 110: | Line 100: | ||
<p>Here are the outlines of the algorithm:</p> | <p>Here are the outlines of the algorithm:</p> | ||
| - | <p>$1$. To start with, cells are | + | <p>$1$. To start with, cells are grown in the dark before the onset of the experiment. We thus have full information on the system because the fluorescence $K(0)$ and the $OD_{600}$ of $C(0)$ correspond to living cells only. </p> |
| - | <p>$2$. | + | <p>$2$. An illumination $I_1(t)$ is calculated, which according to the model is supposed to drive $C(t)$ to its setpoint $C_{target}$. The total fluorescence $F_1(t)$ and the living cell $C_1(t)$ kinetics are also computed.</p> |
<p>$3$. For a certain amount of time $\tau$, more than 10 minutes to see the effect of the illumination, light is applied to the cell suspension at intensity $I_1(t)$</p> | <p>$3$. For a certain amount of time $\tau$, more than 10 minutes to see the effect of the illumination, light is applied to the cell suspension at intensity $I_1(t)$</p> | ||
| Line 123: | Line 113: | ||
<br> | <br> | ||
| - | <p>This algorithm will not | + | <p>This algorithm will not perfectly drive $C(t)$ to its setpoint $C_{target}$. Imperfections in the model will create deviations. But our <a href="https://2013.igem.org/Team:Grenoble-EMSE-LSU/Project/Validation">proof of concept</a> has shown that these are not too big compared to the value of $C_{target}$.</p> |
</li> | </li> | ||
| Line 134: | Line 124: | ||
<p>$1$ Cells are first incubated in the dark during a first period of approximately 100 minutes without illumination to let the bacteria grow and produce KillerRed.<p> | <p>$1$ Cells are first incubated in the dark during a first period of approximately 100 minutes without illumination to let the bacteria grow and produce KillerRed.<p> | ||
| - | <p>$2$ During a second period, the cell suspension was illuminated at maximal intensity ($I=1$). This makes it possible to | + | <p>$2$ During a second period, the cell suspension was illuminated at maximal intensity ($I=1$). This makes it possible to precisely determine the capricious parameters ($b$, $k$ and $l$). The length of this period depends on the precision wanted for the parameters: the longer it lasts, the largest the effects of light are, and more efficiently is the fit improved.</p> |
<p>$3$ Once the parameters are chosen, the model is used to determinate the light intensity predicted to stabilize our system.</p> | <p>$3$ Once the parameters are chosen, the model is used to determinate the light intensity predicted to stabilize our system.</p> | ||
| - | <p>$4$ | + | <p>$4$ Each time the measured values of fluorescence or absorbance are too far from the predicted ones, parameters are re-estimated, and so is the light intensity that is supposed to stabilize the system. This stabilization could be automatically performed by the model predictive control. We instead run our model to determine changes to apply to the light intensity to reach the desired cell density value</p> |
<br> | <br> | ||
| - | <p>Another fact should be | + | <p>Another fact should be taken into consideration. We want to stabilize the living cell density in the minimum time, because otherwise the cell culture may become contaminated or run out of nutrients. We empirically observed that the two first steps of our procedure are essential to speed up the stabilization of the living bacteria population. If the light is set at the stabilizing value $I^*$ from the beginning, the living cell density stabilizes after 8 hours (see the <a href=#AliveCells">predition of living cells</a>). Exposing the bacteria to a large intensity, then reducing the light, makes the living cell population to stabilize more quickly.</p> |
Latest revision as of 01:27, 5 October 2013