-
ATTENTION, RABBIE JACOB IL VA DANSER !!
DO NOT EDIT THIS PAGE!!!
Density Control
The final aim is to control our bacterial population with only one data available : the global fluorescence. But in the experiments, in order to prove that our system works, besides the fluorescence we measured the $OD_{600}$ and the amount of living cells.
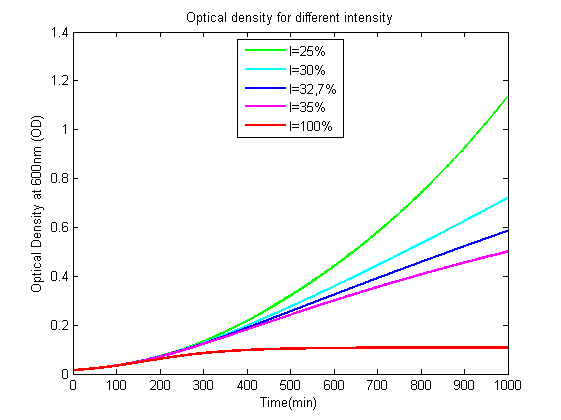
At first, we wanted to have a constant population of living bacteria, therefore an $OD_{600}$ going up in a linear way. The model was necessary to find what would be the best illumination to provide to have as quickly as possible a stable level of the amount of living bacteria.
-
Regulation by Light
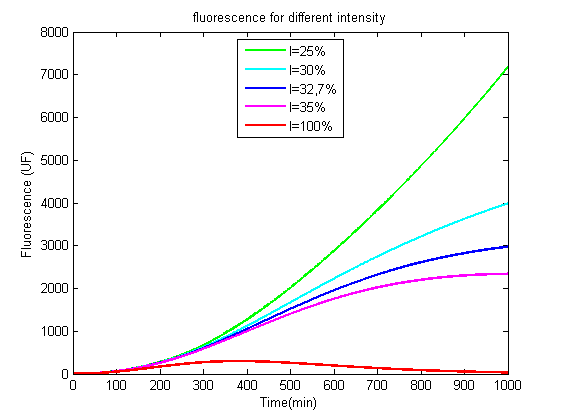
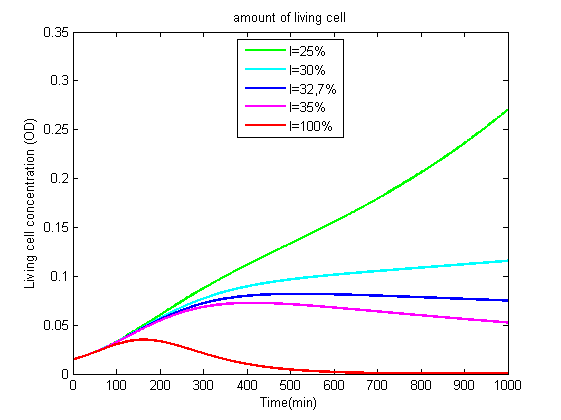
We have shown in the construction of the model that it was theorically possible to stabilize the amount of living bacteria with a constant light. With the complete model, this is still true. On simulations, the light intensity is a very sensitive parameters. Here the predictions of 3 kinetics of 16 hours, illuminated with a power of $1 UF$ for the first (red), $0,327 UF$ for the second (blue) and $0.25 UF$ for the last one (green).
gr
gr
gr
-
Model Predictive Control
A Model Predictive Control is a Process Control able to deal with complex systems like ours. As our system cannot be stabilized with a simple closed-loop control, it is therefore required to a control more advanced like this one. The aim is to drive our system to a setpoint by predicting the evolution of the system, and adapting the answer to these predictions. To do so, the control will use different kinds of variables:
$\bullet$ Some variables defines the setpoint, here, we want to drive our living bacteria concentration to a determinate value, called $C_{target}.
$\bullet$ Some variables are measurable durong the experiment. Here, the fluorescence. They are the only ones that will enable us to see if the system behaves according to plans.
$\bullet$ Other cannont be measured and have to be estimated with the model. Precisely, the living bacteria concentration cannot be measured. This is a reason why the model has to be precise : we will not be able to measure our setpoint, it shall be estimated.
$\bullet$ And variables are the ones used to act on the system. The light intensity will affect the system by decreasing the amount of living bacteria and the concentration of KillerRed.
This is how it works:
$1$. For the first point, we have all the datas : the fluorescence $I(0)$and the amount of living cells $C(0)$(no bacteria has died, so $C(0)=OD_{600}$).
$2$. A illumination $I_1(t)$ is created, it is supposed, according to the model, drive $C(t)$ to its setpoint $C_{target}$. The fluorescence $F_1(t)$ and the amount of cells $C_1(t)$ are also estimated.
$3$. For a determinate time $\tau$, around 10 minutes to have a start of effect, the experiment will be run with the illumination $I_1(t)$
$4$. At time $t=\tau$, the real fluorescence, $F(\tau)$, is measured and compared to the estimated one, $F_1(\tau)$.
$5$. The others parameters like $C(\tau)$ are estimated according to the difference between $F(\tau)$ and $F_1(\tau)$. If $F(\tau)< F_1(\tau)$, it means that we had overestimated the growth of cells, and so now : $C_{real}(\tau)< C_1(\tau)$.
$6$. From these estimated and measured values, it goes back to $2$ and $I_2(t)$, $F_2(t)$ and $C_2(t)$ are created.
It will not drive perfectly $C(t)$ to its setpoint $C_{target}$, the imperfections of the model will create a gap between them. But we have shown the gap is not too big compared to the value of $C_{target}$.
-
Method to Control a Bacterial Population
When the model's parameters were calculated, it appeared that some of them ($b$, $k$ and $l$) were very variable, their value depended a lot on the preparation of the experiment. Sadly, it is important that they are the more accurate possible, the quality of the predictions depend greatly on them. That is the reason why those 3 parameters shall be slightly modified for each experiment.
- Next Page
 "
"