"
"
Team:Grenoble-EMSE-LSU/Project/Modelling/Density
From 2013.igem.org
(Difference between revisions)
| Line 84: | Line 84: | ||
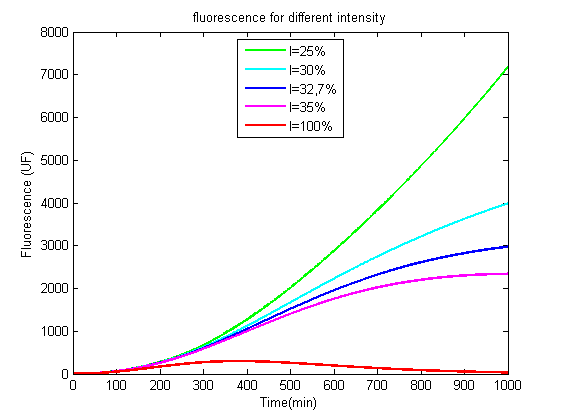
<p>The evolution of KillerRed fluorescence is also very sensitive to the light intensity. It decreases when the illumination is too strong, increases rapidly when it is too weak, and increases more slowly at the stabilizing light intensity $I*$. </p> | <p>The evolution of KillerRed fluorescence is also very sensitive to the light intensity. It decreases when the illumination is too strong, increases rapidly when it is too weak, and increases more slowly at the stabilizing light intensity $I*$. </p> | ||
<center><img src="https://static.igem.org/mediawiki/2013/a/af/Control_3_fluo.png"></center> | <center><img src="https://static.igem.org/mediawiki/2013/a/af/Control_3_fluo.png"></center> | ||
| + | <br> | ||
| + | <br> | ||
| + | <p>Since even small deviations from the stabilizing light intensity $I*$ results in large variations of cell density, an iterative process was designed to determine it with high precision.</p> | ||
| Line 91: | Line 94: | ||
<li > | <li > | ||
<h2 id="MPC">Model Predictive Control</h2> | <h2 id="MPC">Model Predictive Control</h2> | ||
| - | <p> | + | <p>Since our system cannot be stabilized with a simple closed-loop control, we used a more advanced control method : Model Predictive Control. This algorithm is used to control dynamical systems. It requires a mathematical model of the behavior of the system, and the history of the past control actions. The aim is to drive our system to a setpoint by predicting the evolution of the system, and adapting the control parameter (the light intensity here) to these predictions. To do so, the control will use different kinds of variables:</p> |
| - | <p>$\bullet$ Some variables defines the setpoint, here, we want to drive our living bacteria concentration to a determinate value, called $C_{target}.</p> | + | <p>$\bullet$ Some variables defines the setpoint, here, we want to drive our living bacteria concentration to a determinate value, called $C_{target}$.</p> |
| - | <p>$\bullet$ Some variables are measurable | + | <p>$\bullet$ Some variables are measurable during the experiment. Here, the fluorescence and the optical density. They are the only observable quantities enabling us to see whether the system behaves according to plans or not.</p> |
| - | <p>$\bullet$ Other | + | <p>$\bullet$ Other variables cannot be measured and have to be estimated with the model. In our case, the living bacteria concentration cannot be measured in real time, it will be estimated from the measurable quantities. The model thus needs to be precise. |
| - | <p>$\bullet$ And variables are the ones used to act on the system. | + | <p>$\bullet$ And some variables are the ones used to act on the system. In our case, this is the light intensity will affect the system by decreasing the amount of living bacteria and the concentration of KillerRed.</p> |
<br> | <br> | ||
| - | <p> | + | |
| - | <p>$1$. | + | |
| - | <p>$2$. A illumination $I_1(t)$ is | + | |
| + | <p>Here are the outlines of the algorithm:</p> | ||
| + | <p>$1$. To start with, cells are first grown in the dark before the onset of the experiment. We thus have full information on the system because the fluorescence $K(0)$ and the $OD_{600}$ of $C(0)$ correspond to living cells only. </p> | ||
| + | |||
| + | <p>$2$. A illumination $I_1(t)$ is calculated, which, according to the model, is supposed to drive $C(t)$ to its setpoint $C_{target}$. The total fluorescence $F_1(t)$ and the living cell $C_1(t)$ kinetics are also computed.</p> | ||
| + | |||
<p>$3$. For a determinate time $\tau$, around 10 minutes to have a start of effect, the experiment will be run with the illumination $I_1(t)$</p> | <p>$3$. For a determinate time $\tau$, around 10 minutes to have a start of effect, the experiment will be run with the illumination $I_1(t)$</p> | ||
<p>$4$. At time $t=\tau$, the real fluorescence, $F(\tau)$, is measured and compared to the estimated one, $F_1(\tau)$. </p> | <p>$4$. At time $t=\tau$, the real fluorescence, $F(\tau)$, is measured and compared to the estimated one, $F_1(\tau)$. </p> | ||
Revision as of 12:54, 3 October 2013