 "
"
Team:Tokyo Tech
From 2013.igem.org
| (5 intermediate revisions not shown) | |||
| Line 6: | Line 6: | ||
if(k==1){ | if(k==1){ | ||
document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/f/fc/Titech2013_home_step1circuitanime.gif"; | document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/f/fc/Titech2013_home_step1circuitanime.gif"; | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif"; | document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif"; | ||
document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | ||
| Line 19: | Line 14: | ||
if(k==2){ | if(k==2){ | ||
document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/b/bc/Titech2013_home_step2circuitanime.gif"; | document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/b/bc/Titech2013_home_step2circuitanime.gif"; | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | ||
document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/0/07/Titech2013_home_step2active.gif"; | document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/0/07/Titech2013_home_step2active.gif"; | ||
| Line 32: | Line 22: | ||
if(k==3){ | if(k==3){ | ||
document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/a/af/Titech2013_home_step3circuitanime.gif"; | document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/a/af/Titech2013_home_step3circuitanime.gif"; | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | ||
document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | ||
| Line 45: | Line 30: | ||
if(k==4){ | if(k==4){ | ||
document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/5/59/Titech2013_home_step4circuitanime.gif"; | document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/5/59/Titech2013_home_step4circuitanime.gif"; | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | ||
document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | ||
| Line 58: | Line 38: | ||
if(k==5){ | if(k==5){ | ||
document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/3/37/Titech2013_home_step5circuitanime.gif"; | document.getElementById("circuit").src="https://static.igem.org/mediawiki/2013/3/37/Titech2013_home_step5circuitanime.gif"; | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | document.getElementById("step1").src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"; | ||
document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | document.getElementById("step2").src="https://static.igem.org/mediawiki/2013/b/b0/Titech2013_home_step2.gif"; | ||
| Line 107: | Line 82: | ||
<h3><font size="6">S</font>tory</h3> | <h3><font size="6">S</font>tory</h3> | ||
<h2><p> | <h2><p> | ||
| - | Ninja is a Japan's ancient spy-warrior. Ninja usually mimics an ordinary civilian. Once he detects samurai who is the target of assassination, he immediately gets ready for battle. He attacks samurai by throwing so-called "ninja stars | + | Ninja is a Japan's ancient spy-warrior. Ninja usually mimics an ordinary civilian. Once he detects samurai who is the target of assassination, he immediately gets ready for battle. He attacks samurai by throwing so-called "ninja stars". These weapons are called "shuriken" in Japanese (Fig. 1-1-2). |
</p></h2> | </p></h2> | ||
</td> | </td> | ||
| Line 119: | Line 94: | ||
<table align="center" border=0> | <table align="center" border=0> | ||
<tr><td> | <tr><td> | ||
| - | <span onclick="show(1)"><img id="step1" src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif" width="400" border=0 onmouseover=this.src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif" onmouseout=this.src="https://static.igem.org/mediawiki/2013/ | + | <span onclick="show(1)"><img id="step1" src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif" width="400" border=0 onmouseover=this.src="https://static.igem.org/mediawiki/2013/4/47/Titech2013_home_step1active.gif" onmouseout=this.src="https://static.igem.org/mediawiki/2013/d/d8/Titech2013_home_step1.gif"></span></td> |
<td rowspan=5 align="center"> | <td rowspan=5 align="center"> | ||
| Line 142: | Line 117: | ||
<td colspan=2> | <td colspan=2> | ||
<h3><font size="6">P</font>roject Overview</h3> | <h3><font size="6">P</font>roject Overview</h3> | ||
| - | <h2><p>In our programming of artificial genetic circuit, <i>E. ninja</i> heads casts. In response to <i>E. civilian</i> signal or <i>E. samurai</i> signal, <i>E. ninja</i> changes its state: "Mimic state" or "Attack state | + | <h2><p>In our programming of artificial genetic circuit, <i>E. ninja</i> heads casts. In response to <i>E. civilian</i> signal or <i>E. samurai</i> signal, <i>E. ninja</i> changes its state: "Mimic state" or "Attack state". The circuit of <i>E. ninja</i> contains a bi-stable switch part and a signal dependent switching part. We decided to use 3OC6HSL and 3OC12HSL as the signals. The crosstalk between these two signals is well known as a significant problem in synthetic biology. To realize an accurate switching, we designed a circuit which achieved the circumvention of crosstalk that occurs in bacterial cell-cell communication system (Fig. 1-1-4). |
<div align="right"><a href="https://2013.igem.org/Team:Tokyo_Tech/Project/Ninja_State_Switching#1._Introduction">(Go to State Switching page)</a></div> | <div align="right"><a href="https://2013.igem.org/Team:Tokyo_Tech/Project/Ninja_State_Switching#1._Introduction">(Go to State Switching page)</a></div> | ||
</p></h2> | </p></h2> | ||
| Line 184: | Line 159: | ||
<tr> | <tr> | ||
<td> | <td> | ||
| - | <a href="https://2013.igem.org/Team:Tokyo_Tech/Experiment/pSB-M13_Plasmid_Assay#1._Introduction"><img src="https://static.igem.org/mediawiki/2013/ | + | <a href="https://2013.igem.org/Team:Tokyo_Tech/Experiment/pSB-M13_Plasmid_Assay#1._Introduction"><img src="https://static.igem.org/mediawiki/2013/5/57/Titech2013_Project_M13_shuriken_Fig_2-2-3.png" width="240"></a><br> |
| - | <h4>[Fig. 1-1-6. Our new part for inducible phage release]<br>We designed a new part for inducible phage release. | + | <h4>[Fig. 1-1-6. Our new part for inducible phage release]<br>We designed a new part for inducible phage release. Varoius promoters are allowed to be inserted upstream of <i>g2p</i> to regulate the phage release. |
</h4> | </h4> | ||
</td> | </td> | ||
Latest revision as of 03:43, 29 October 2013

Project BackgroundIn this iGEM Competition, we intended to tell the public about the development of synthetic biology, especially about the network programming, as well as we enjoyed our activity for iGEM. Tokyo Tech 2013 assisted with an experiment workshop for high school students, participated in a poster session and collected feedback from public people as human practice (Fig. 1-1-1). We learned that an interesting story is an easier way to make general people understand the importance of genetic programming in synthetic biology. To respond further to the feedback that we received, we also address a farming issue. Thus, we designed a story which contains a farming issue and a state switching circuit in E. coli, the life of ninja: battle and farming. |
 [Fig. 1-1-1. Poster session]
|
|||||||
[Fig. 1-1-2. Ninja vs. Samurai in Tokyo Tech]
|
StoryNinja is a Japan's ancient spy-warrior. Ninja usually mimics an ordinary civilian. Once he detects samurai who is the target of assassination, he immediately gets ready for battle. He attacks samurai by throwing so-called "ninja stars". These weapons are called "shuriken" in Japanese (Fig. 1-1-2). |
|||||||
Click a step shown below to know what happens in our circuit!
|
||||||||
Project OverviewIn our programming of artificial genetic circuit, E. ninja heads casts. In response to E. civilian signal or E. samurai signal, E. ninja changes its state: "Mimic state" or "Attack state". The circuit of E. ninja contains a bi-stable switch part and a signal dependent switching part. We decided to use 3OC6HSL and 3OC12HSL as the signals. The crosstalk between these two signals is well known as a significant problem in synthetic biology. To realize an accurate switching, we designed a circuit which achieved the circumvention of crosstalk that occurs in bacterial cell-cell communication system (Fig. 1-1-4). |
 [Fig. 1-1-3. The result of our wet experiment for the circumvention of the crosstalk] |
|||||||
 [Fig. 1-1-4. Our designed circuit for the circumvention of crosstalk]
|
||||||||
|
Our wet experiment results showed that the combination of lux/tet hybrid promoter and TetR protein circumvented the crosstalk by preventing the LasR protein from acting on LuxR-binding sequences (Fig. 1-1-3). Our mathematical model based on these results showed the circumvention of crosstalk in the circuit including toggle switch and crosstalk circumvention system(Fig. 1-1-5). |
||||||||
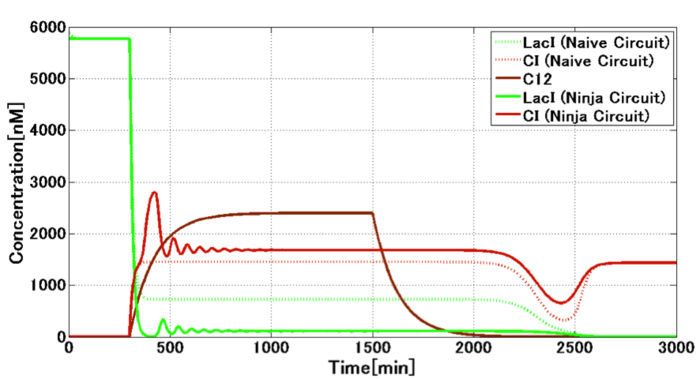 [Fig. 1-1-5. Our mathematical model for the circuit of E. ninja] |
||||||||
 [Fig. 1-1-6. Our new part for inducible phage release]
|
 [Fig. 1-1-7. Distribution of plaques and analysis] |
In addition, E. ninja releases M13 phage, which corresponds to shuriken, when E. ninja receives E. samurai signal. The inducible phage release will open a new way in synthetic biology by achieving the programmed DNA messaging (Fig. 1-1-6). |
||||||
|
In the second-life story, E. ninja starts farming in a peaceful village. He can increase plant growth by synthesizing several plant hormones depending on the soil environment. We constructed an improved phosphate sensor (phoA promoter, BBa_K1139201). Also, we learned methods for quantitative analysis for cytokinin, one of the plant hormones, through a bioassay of cucumber seed sprouts (Fig. 1-1-8). Towards further consideration of farming with microbes, we also continued the human practice investigation through some interviews with science foundations and organizations (Fig. 1-1-8). Future Works |
 [Fig. 1-1-8. Our bioassay of cucumber seed sprouts]
|
|||||||
|
We believe that our project can contribute to various fields. First, our crosstalk circumvention system gives more flexibility to design genetic circuits. By adding only a few genes, you can circumvent crosstalk of AHL. Second, our inducible phage release system can make DNA messaging more complex and more diverse. Moreover, for bioremediation, we can search for new M13 phage hosts by using our designed M13 phage. Finally, our farming project is expected to act as a pioneering trail toward new approaches in farming. Especially, our strategy to produce plant hormones in temporal patterns in E. coli can be applied to studying the plants' response to external plant hormones. We hope to contribute to spreading the importance and the great possibilities of synthetic biology through the public. |
||||||||











Aizawa Foundation
Mr. Isao Ono Mr. Fumio Hombo
