"
"
Team:Evry/LogisticFunctions
From 2013.igem.org
| (11 intermediate revisions not shown) | |||
| Line 5: | Line 5: | ||
<div id="mainTextcontainer"> | <div id="mainTextcontainer"> | ||
| - | <h1>Logistic | + | <h1>Logistic functions</h1> |
<p>When we started to model biological behaviors, we realised very soon that we were going to need a function that simulates a non-exponential evolution, that would include a simple speed control and a maximum value. A smooth step function.</p> | <p>When we started to model biological behaviors, we realised very soon that we were going to need a function that simulates a non-exponential evolution, that would include a simple speed control and a maximum value. A smooth step function.</p> | ||
| Line 18: | Line 18: | ||
<li><b>Q</b> : Magnitude.<br/> <i>The limit of g as x approaches infinity is Q.</i></li> | <li><b>Q</b> : Magnitude.<br/> <i>The limit of g as x approaches infinity is Q.</i></li> | ||
<li><b>d</b> : Threshold.<br/> <i>The value of x from which we consider the start of the phenomenon.</i></li> | <li><b>d</b> : Threshold.<br/> <i>The value of x from which we consider the start of the phenomenon.</i></li> | ||
| - | <li><b>p</b> : Precision.<br/> | + | <li><b>p</b> : Precision.<br/> <i><img src="https://static.igem.org/mediawiki/2013/3/3b/Gdp.jpg"/> Since the function never reaches 0 nor Q, we have to set an approximation for 0 or Q.</i></li> |
<li><b>k</b> : Efficiency.<br/> <i>This parameter influences the length of the phenomenon.</i></li> | <li><b>k</b> : Efficiency.<br/> <i>This parameter influences the length of the phenomenon.</i></li> | ||
</ul> | </ul> | ||
| - | <p><img width=" | + | <p><img width="70%" src="https://static.igem.org/mediawiki/2013/0/05/CourbeLogistique.png"/></p> |
<h2>Differential form:</h2> | <h2>Differential form:</h2> | ||
| Line 33: | Line 33: | ||
</p> | </p> | ||
| - | <p>Here is our logistic function. Yet, differential equations are not always time-related. | + | <p>Here is our logistic function. Yet, differential equations are not always time-related.<br/> |
Let x be a temporal function, and y be a x-related logistic function. In order to integrate y into a temporal ODE, we need to write it differently:<br/> | Let x be a temporal function, and y be a x-related logistic function. In order to integrate y into a temporal ODE, we need to write it differently:<br/> | ||
| + | <img src="https://static.igem.org/mediawiki/2013/4/40/Logistic_calcul1.jpg"/><br/> | ||
| - | + | But this equation can't be integrated in a temporal system like other equations. Because y depend on x. In our model, x is a state variable of the system. To implement this equation, we solve it before the entire system. | |
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| - | + | ||
| + | <!-- | ||
| + | If <img src="https://static.igem.org/mediawiki/2013/a/a0/Txdet.jpg"/> is a continuous real function, then:<br/> | ||
| + | <img src="https://static.igem.org/mediawiki/2013/5/5e/Yxtegalyt.jpg"/><br/> | ||
Finally,<br/> | Finally,<br/> | ||
| - | + | <img src="https://static.igem.org/mediawiki/2013/b/bd/Logistic_calcul2.jpg"/> | |
| - | + | --> | |
</p> | </p> | ||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
| - | |||
</div> | </div> | ||
Latest revision as of 02:42, 29 October 2013










Logistic functions
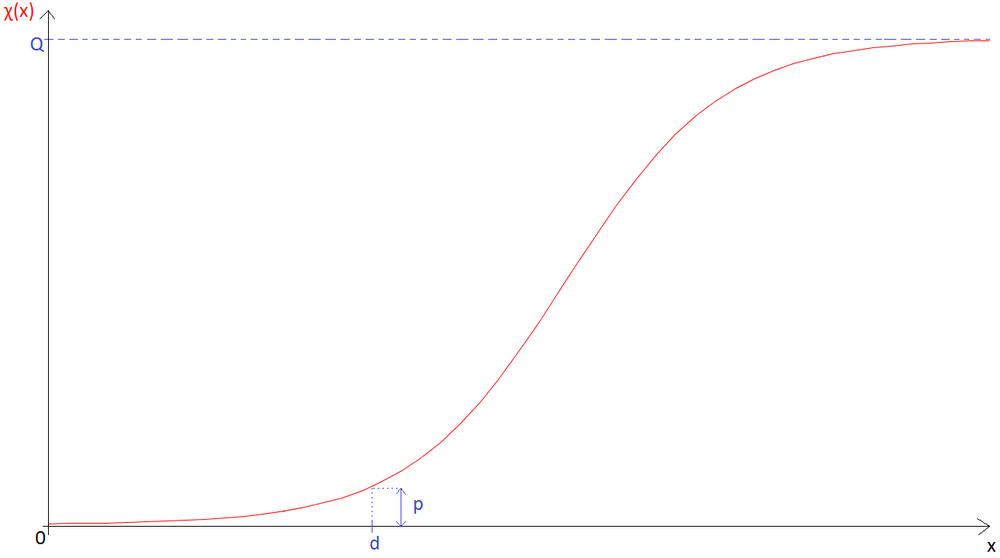
When we started to model biological behaviors, we realised very soon that we were going to need a function that simulates a non-exponential evolution, that would include a simple speed control and a maximum value. A smooth step function.
Such functions, named logistic functions were introduced around 1840 by M. Verhulst.
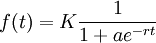
These functions looked perfect, but we needed more control : we needed to set a starting value and a precision.
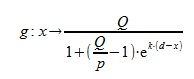
Parameters:
- Q : Magnitude.
The limit of g as x approaches infinity is Q. - d : Threshold.
The value of x from which we consider the start of the phenomenon. - p : Precision.
 Since the function never reaches 0 nor Q, we have to set an approximation for 0 or Q.
Since the function never reaches 0 nor Q, we have to set an approximation for 0 or Q. - k : Efficiency.
This parameter influences the length of the phenomenon.
Differential form:
Let the following be a Cauchy problem:
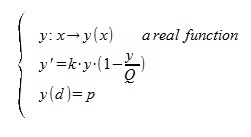
The solution of this Cauchy problem is as below:
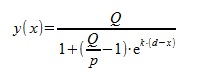
Here is our logistic function. Yet, differential equations are not always time-related.
Let x be a temporal function, and y be a x-related logistic function. In order to integrate y into a temporal ODE, we need to write it differently:
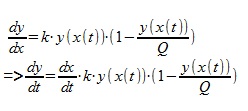
But this equation can't be integrated in a temporal system like other equations. Because y depend on x. In our model, x is a state variable of the system. To implement this equation, we solve it before the entire system.